von Melf-Hinrich Ehlers*
Autonome Landmaschinen für den Pflanzenbau sind technisch umsetzbar und praktisch einsetzbar. Allerdings könnten gesetzliche Auflagen ihre Verbreitung verlangsamen. Wir haben die wirtschaftlichen Auswirkungen solcher Regulierungen analysiert. Regulatorische Auflagen könnten auf kleinen Pflanzenbaubetrieben die Kosten autonomer Landmaschinen vergleichsweise stark erhöhen und somit den Druck, Betriebe zu vergrössern, verstärken.
Die Digitalisierung erfasst den Agrar- und Ernährungssektor in ganzer Breite. Über neue Daten, Automatisierung und autonome Technologien kann sie neue Optionen bieten die Probleme des Sektors anzugehen*, **. Autonome Landmaschinen, auch Agrarroboter genannt, adressieren Probleme wie beispielsweise knappe Arbeitskraft, unsichere Versorgung mit Nahrungsmitteln, den Klimawandel und Umweltauswirkungen der Landwirtschaft. Sie könnten unter anderem in Schwärmen arbeiten und grosse schwere Landmaschinen ersetzen, leicht mit erneuerbaren Energien betrieben werden und mit grösserer Präzision auf pflanzenbauliche Erfordernisse eingehen. Damit können Agrarroboter zukünftig auch wichtige Rollen in der für die Digitalisierung des Pflanzenbaus zentralen Präzisionslandwirtschaft einnehmen***, ****. Die Vorteile autonomer Technologie für den Pflanzenbau sind jedoch von unterstützenden regulatorischen Rahmenbedingungen abhängig.

Abbildung 1: Ein solarbetriebener Sä- und Jätroboter bei der Arbeit auf einem Zuckerrübenfeld in Deutschland (Quelle: FarmDroid, Solar-Energie Andresen GmbH).
In einem kürzlich in der Zeitschrift Applied Economic Perspectives and Policy erschienenen Artikel***** analysieren wir Regulierungen mit bedeutendem Einfluss auf den praktischen Einsatz autonomer Technologien im Pflanzenbau. Wir untersuchen, was aus der Regulierung autonomer Maschinen in anderen Sektoren gelernt werden kann und beschreiben den aktuellen Stand der Regulierung autonomer Landmaschinen. Anhand eines Beispiels aus Grossbritannien veranschaulichen wir, wie regulatorische Auflagen die Wirtschaftlichkeit des Einsatzes von autonomen Landmaschinen im Pflanzenbau beeinflussen.
Autonome Landmaschinen für den Pflanzenbau werden rund um den Globus erprobt. Jätroboter sind in Europa besonders populär. In Frankreich sind beispielsweise über 150 solcher Maschinen im Einsatz. In Nordamerika sind Bausätze erhältlich, die gewöhnliche Traktoren und Getreideanhänger zu fahrerlosen Abfuhrgespannen machen, die mit der bemannten Erntemaschine zusammenarbeiten. Aufgrund des hohen Bedarfs an Arbeitskraft wird intensiv an der Entwicklung von autonomen Gemüse- und Obsterntemaschinen gearbeitet.
Aus Erfahrungen mit anderen autonomen Maschinen lassen sich mögliche Auswirkungen von Regulierung auf den praktischen Einsatz autonomer Maschinen im Pflanzenbau ableiten. Die Gesetzgebung zum Einsatz von Drohnen ist recht fortgeschritten und betrifft vor allem räumliche Beschränkungen, den Sichtkontakt und Auflagen für menschlichen Eingriffsmöglichkeiten beim Einsatz. Schwerere landwirtschaftliche Drohnen sind vorwiegend in Ländern wie China und Brasilien verbreitet, wo menschliche Überwachung und Eingriffsmöglichkeiten weniger stark reguliert sind als in Ländern, die nur einen Betrieb in Sichtweite erlauben. Langjährige Erfahrungen mit dem Einsatz autonomer Fahrzeuge in offenen Minen haben in Australien zur Entwicklung eines «Code of Practice» geführt. Dieser regelt Information, Training und Überwachung, Gefahrenkontrolle und Ablaufpläne für Notfälle beim Betrieb autonomer Minenfahrzeuge, fordert aber keine menschliche Überwachung direkt vor Ort. Minen sind allerdings stärker kontrollierte Umgebungen, denn sie sind eingezäunt und nicht offen für Personen und Tiere zugänglich, wie es landwirtschaftliche Felder sind. Autonome Landmaschinen müssen also viel eher mit unerwarteten Begegnungen umgehen können. Dies gilt auch für autonome Fahrzeuge auf öffentlichen Strassen, welche jedoch aufwendiger reguliert werden als autonome Landmaschinen. Letztere fahren langsamer, in weniger beengtem Raum und können besser über Technologie auf einem Feld koordiniert werden. Melkroboter hingegen sind stationär und wurden von Anfang an wie feststehende Industrieroboter reguliert, was schon frühzeitig ihre Verbreitung unterstützte. Demgegenüber sind Regeln für autonome Landmaschinen im Pflanzenbau noch im Entwicklungsprozess und werden unterschiedlich interpretiert, was hinderlich für ihre Entwicklung und Verbreitung ist.
Heute gibt es ISO-Normen mit technologischen Vorgaben für landwirtschaftliche Roboter, wie zum Beispiel die Erkennung von Hindernissen, Arbeitsgeschwindigkeit und Alarm. Darüber hinaus konzentriert sich die Regulierung autonomer Maschinen im Pflanzenbau primär auf die Arbeitssicherheit. In Kalifornien wird beispielsweise ältere Gesetzgebung für furchengeführte Erntemaschinen zur Regulierung autonomer Landmaschinen genutzt. Gemäss dieser Gesetzgebung wird eine Aufsichtsperson direkt an der Maschine gefordert. Die Vision eines aus der Ferne überwachten Feldroboters, der es Landwirt:innen ermöglicht sich zur gleichen Zeit mit anderen Aufgaben zu beschäftigen, wäre bei strenger Interpretation dieser Gesetze unmöglich. Auch die Vorgabe einer Arbeitsgeschwindigkeit von maximal zwei Meilen pro Stunde ist restriktiv, da konventionelle Landmaschinen im Pflanzenbau meist viel schneller fahren. Die Vorschläge für die überarbeite Maschinenrichtlinie der Europäischen Union können hingegen so interpretiert werden, dass menschliche Überwachung vor Ort zwar gewährleistet sein muss, die Überwachungsperson sich aber entfernen kann und nur gelegentlich genauer kontrolliert, während sie sich anderen Aufgaben widmet. Anstatt sich auf bestehende Gesetze zu beziehen, entwickelt die australische Getreideindustrie einen «Code of Practice» für autonome Landmaschinen im Feldbau, der sich an der australischen Minenindustrie orientiert. Zentrale Gegenstände dieser Regulierungsinitiativen sind begrenzte Arbeitsgeschwindigkeiten und Auflagen für die Überwachung autonomer Landmaschinen vor Ort. Eine geringe Arbeitsgeschwindigkeit ist im Vergleich zu konventionellen Landmaschinen ein ökonomisch weniger bedeutendes Problem, wenn autonome Landmaschinen nicht von mindestens einer einzelnen Person überwacht werden müssen.
Die wirtschaftlichen Auswirkungen von Auflagen zur Überwachung autonomer Landmaschinen wurden mithilfe linearer Programmierung im Fall des britischen Getreidebaus für unterschiedliche Betriebsgrössen genauer untersucht. Autonome Landmaschinen übernahmen hier alle Feldarbeiten, die konventionell mit bemannten Maschinen ausgeführt werden würden. Der Fokus lag auf Auswirkungen von drei Abstufungen menschlicher Überwachungsanforderungen der autonomen Landmaschinen:
- 10% der Zeit auf dem Feld werden für die Überwachung einer autonomen Landmaschine benötigt: spiegelt ein Szenario mit niedrigen Auflagen wider und ermöglicht den Einsatz mehrerer von einer Person betreuten autonomen Landmaschinen im Feld.
- 50% der Zeit auf dem Feld: basiert auf der Annahme, dass die Überwachungsperson die ganze Zeit auf dem Feld sein muss, falls etwas schief geht, sich aber auch auf andere Arbeiten konzentrieren kann (z.B. einen Traktor fahren oder am Feld Managementaufgaben nachgehen).
- 100% der Zeit auf dem Feld: reflektiert die Sichtkontaktregel für Drohnen oder die Kalifornischen Regeln für fahrerlose Landmaschinen. Hier ist jeweils eine Peron für eine autonome Landmaschine zuständig.
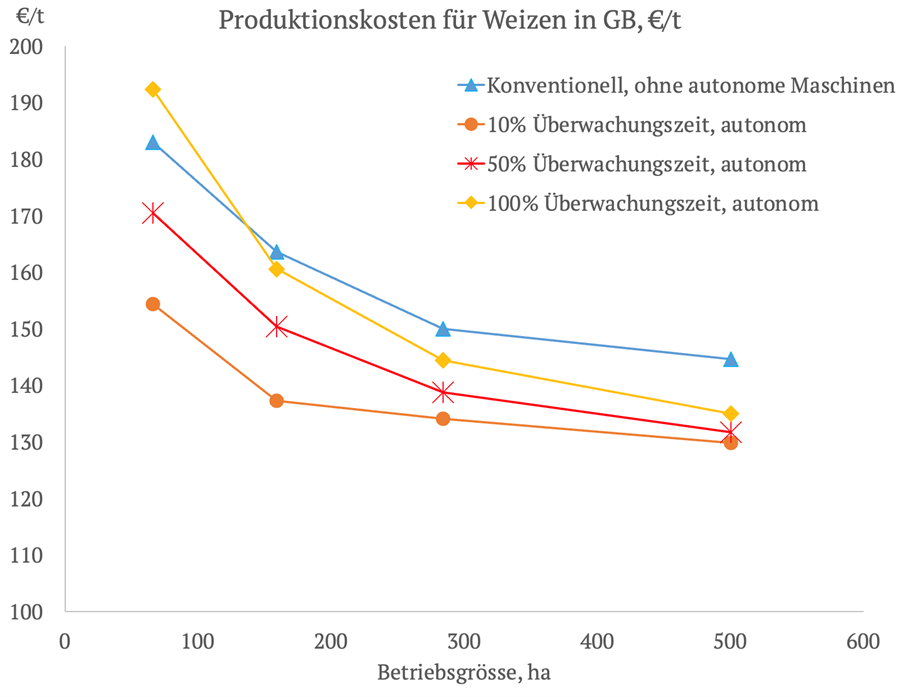
Abbildung 2: Kosten der Weizenproduktion in Grossbritannien mit konventionellen Maschinen und autonomen Landmaschinen mit unterschiedlichen Regeln für Überwachungszeiten (Wechselkurs war 1.1 €/GBP).
Die Ergebnisse dargestellt in Abbildung 2 zeigen, dass die Kosten für den Weizenanbau stark durch die Überwachungsauflagen für autonome Landmaschinen beeinflusst werden. Im Fall von 100% Überwachungszeit werden bei kleinen Betrieben die Kosten der Nutzung konventioneller Maschinen überstiegen. Mit zunehmender Betriebsgrösse fallen die Kosten der Weizenproduktion und dies besonders schnell bei hohen Auflagen zur Überwachungszeit für autonome Landmaschinen. Folglich werden hohe Auflagen den Druck, Betriebe zu vergrössern, zusätzlich verschärfen. Im Allgemeinen dürften sich autonome Landmaschinen bei solchen Regulierungen also eher auf grossen Pflanzenbaubetrieben durchsetzen. Die Vision, dass zukünftig durch den Einsatz kleiner Feldroboter eine kleinstrukturierte Landwirtschaft unterstützt wird, ist damit kritisch zu hinterfragen. Zusammenfassend ist festzuhalten, dass in der Bewertung digitaler Technologien für die Landwirtschaft nicht nur die Skaleneffekte technologischer Innovationen als solche Beachtung finden müssen, sondern auch jene, die durch regulatorische Auflagen entstehen.
* Melf-Hinrich Ehlers war bis Juli 2021 an der Gruppe Agrarökonomie und -politik der ETH Zürich und ist jetzt bei Agroscope, Forschungsgruppe Sozioökonomie, in Tänikon, CH-8356 Ettenhausen.
* Walter, Achim, Robert Finger, Robert Huber und Nina Buchmann, 2017. Opinion: Smart farming is key to developing sustainable agriculture. PNAS 114, 6148–6150. https://doi.org/10.1073/pnas.1707462114
** Ehlers, Melf-Hinrich, Robert Huber und Robert Finger, 2021. Agricultural policy in the era of digitalisation. Food Policy 100, 102019. https://doi.org/10.1016/j.foodpol.2020.102019
*** Späti, Karin, Robert Huber und Robert Finger, 2021. Benefits of increasing information accuracy in variable rate technologies. Ecological Economics 185, 107047. https://doi.org/10.1016/j.ecolecon.2021.107047
**** Finger, Robert, Scott M. Swinton, Nadja El Benni und Achim Walter, A., 2019. Precision farming at the nexus of agricultural production and the environment. Annual Review of Resource Economics 11, 313–335. https://doi.org/10.1146/annurev-resource-100518-093929
***** Lowenberg-DeBoer, James, Karl Behrendt, Melf-Hinrich Ehlers, Carl Dillon, Andreas Gabriel, Iona Yuelu Huang, Ian Kumwenda, Mark Tyler, Andreas Meyer-Aurich, Gabor Milics, Kehinde Oluseyi Olagunju, Søren Marcus Pedersen, Jordan Shockley und David Rose 2021. “Lessons to be learned in adoption of autonomous equipment for field crops.” Applied Economic Perspectives and Policy 1–17. https://doi.org/10.1002/aepp.13177.
